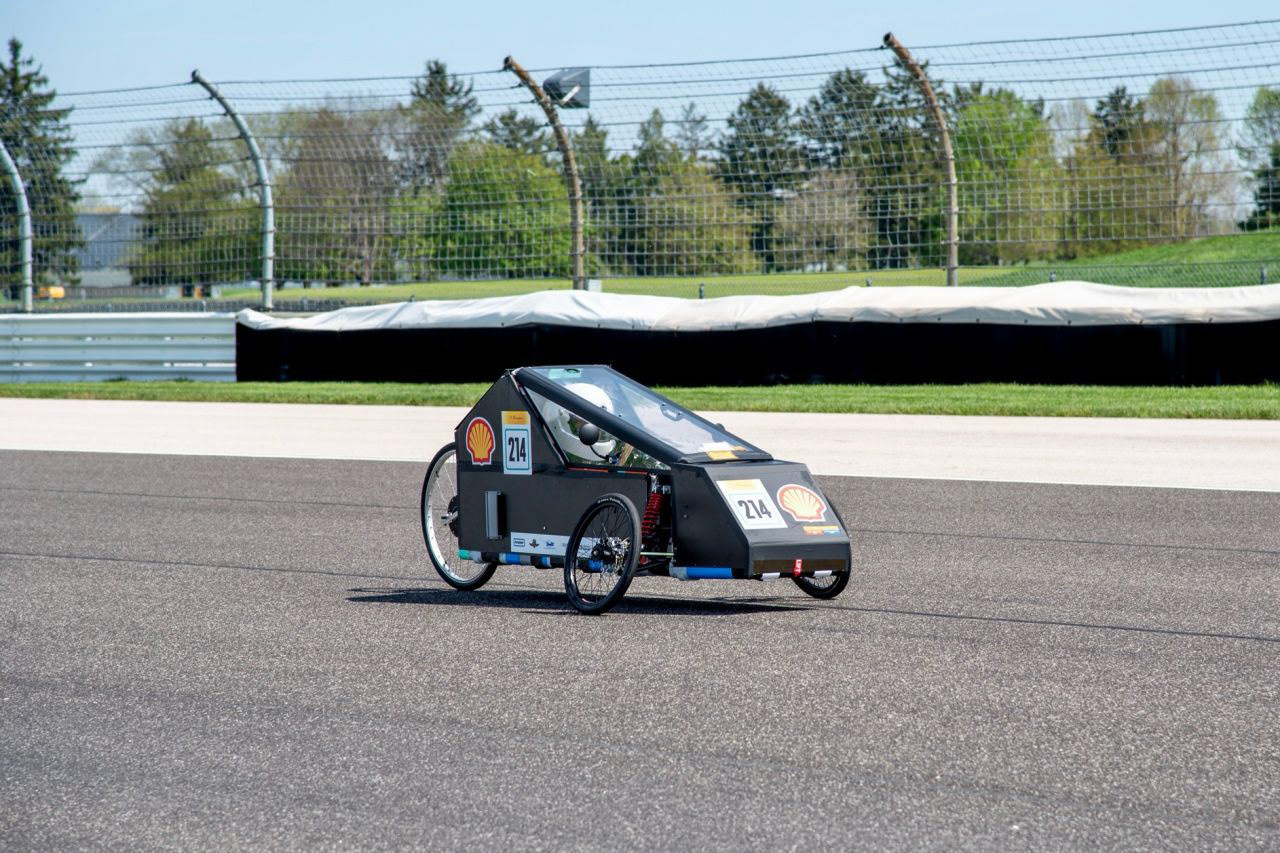
I designed the braking and steering systems for a hydrogen fuel-cell car to compete in the Shell Eco-Marathon spring 2026 competition. The car was designed by the Hydrogen Fuel Cell Club, which is completely student-organized and directed, but sponsored by the engineering department at Swarthmore.
Over the course of the year, we redesigned a previous hydrogen car to feature a lighter carbon-fiber chassis in place of aluminum and a tighter steering radius with a vertical steering wheel. We started by creating a digital twin model of the car to support dimensioning and modeling. A model was created based on the chassis construction, but the as-built dimensions deviated from the initial design specifications. The Fusion 360 digital twin model was my first contribution to the team and was useful for many other people’s design projects.
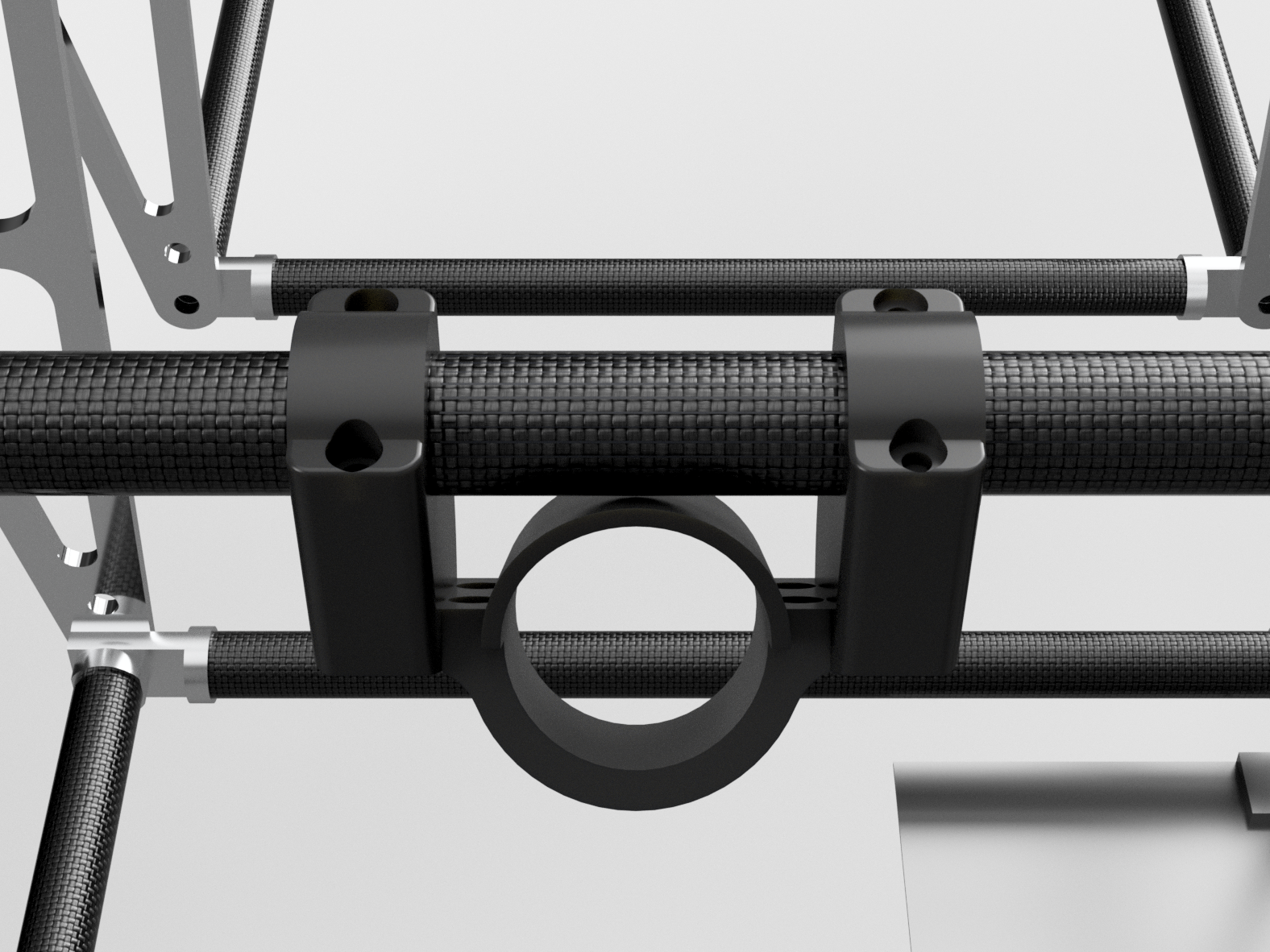
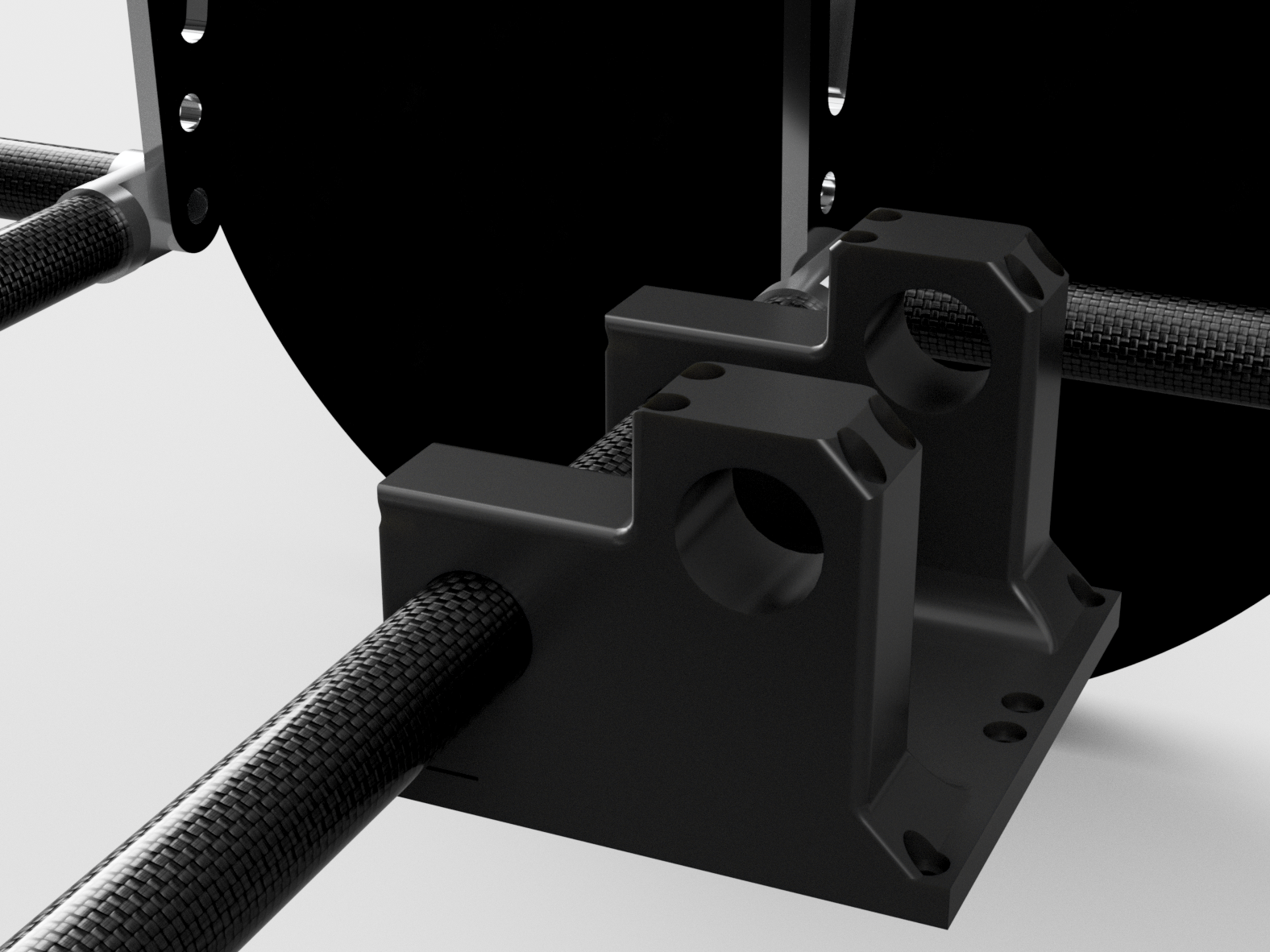
The steering had to be designed around the existing carbon fiber frame that made up the chassis. There were a few requirements: it had to be as light as possible because the rack-and-pinion was heavy; the minimum amount of extra material because things are cramped; the smallest possible steering radius; and everything had to be easily replaceable and repairable. I designed a mount for an off-the-shelf go-cart rack-and-pinion that maximized strength for 3D printing and used generative design to optimize the mounting bracket’s geometry relative to the chassis-supporting bars. Once the rack and pinion were in place, I machined tie rods to attach to the wheels. I also designed the steering wheel and steering wheel holder, which allows for angle adjustment. The steering wheel is not only ergonomic but has the necessary buttons (throttle, horn, and brake) easily accessible with two hands on the wheel.
For the front brakes, I adapted dual capliper hydraulic ATV calipers for synchronized actuation. So with one pedal, both wheels could be pressed simultaneously. The most challenging part of the brake was designing and machining an aluminum mount for the calipers on the wheels, which involved complex angles and important geometry that, if done incorrectly, would prevent the wheels from spinning or the brakes from fitting. I kept the original hand lever and adapted it into a foot pedal that was in the center of the car. Through this process, I learned a lot about hydraulic mechanisms and brakes, as well as the CNC process for more complicated geometry.