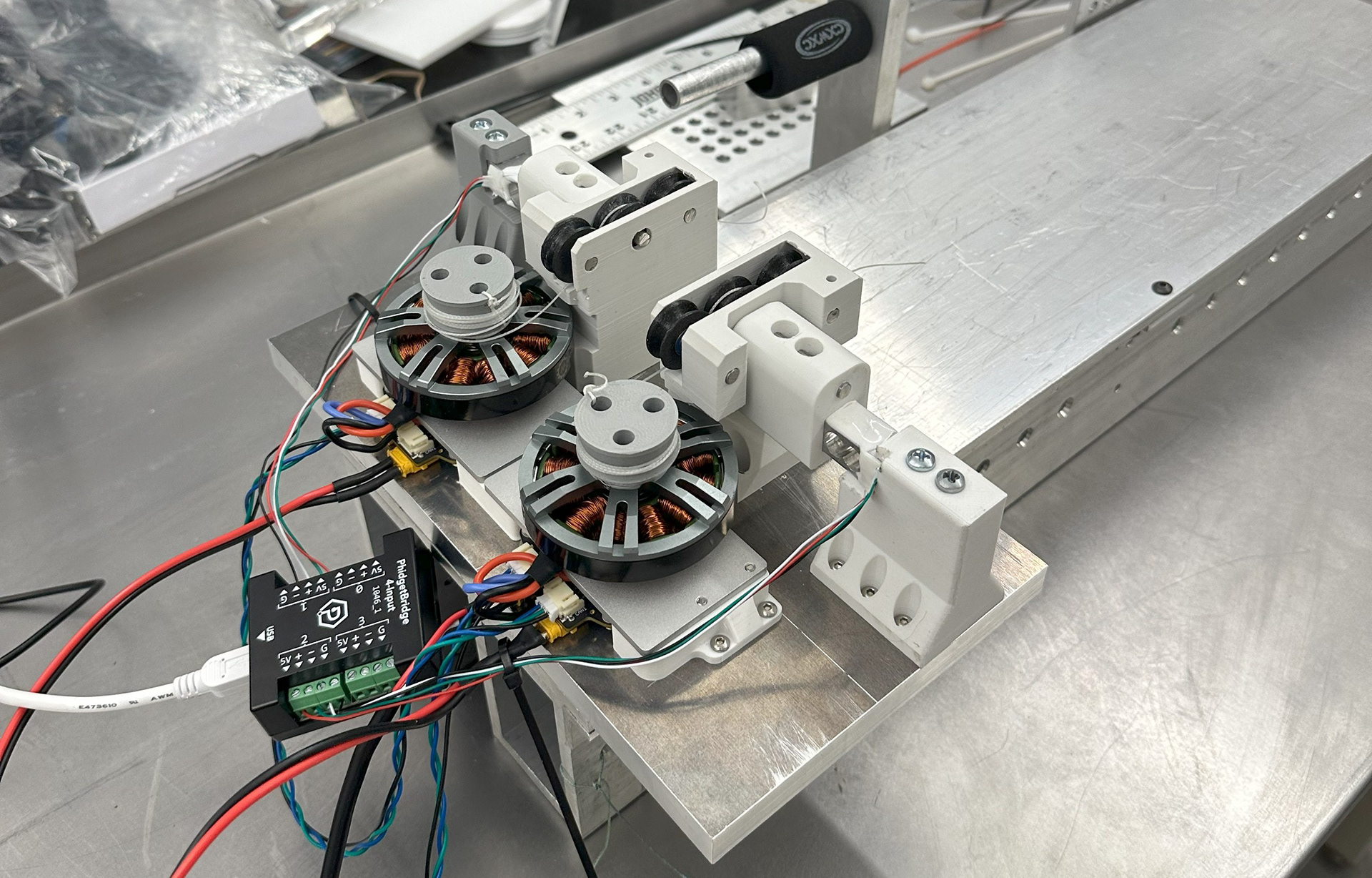
This summer, I worked with Professor Joseph Towles and Brad Johnston in the Neuromuscular Biomechanics Lab. The goal of the summer was to make a motor array that simulates tendon activation in cadaver hands in order to collect data related to the forces and distances required for pinch and grip with the thumb and index finger, but also how the tendon movements translate to the movement properties in the digits. We ended the summer with a mount that housed two brushless motors and two tension sensors hooked up to a computer and controlled by LabVIEW. Our motor generated about 130N, and the load cell was accurate for about 100N. This summer, the project was a fulfilling experience. It taught me what it is like to develop a machine or tool for a research project, design parts that optimize precision and strength, and work more effectively on a team.
This design project differed from other projects I've done because it had such specific strength and precision requirements. This required things to be optimized more for their performance than their aesthetics, and even sometimes in engineering, aesthetics is a crucial component of design. Because of this, I approached it differently than other projects. Instead of conceptualizing what the final product would look like, I considered each component in the system and which variation would best suit our requirements. For example, what kind of motor did we want to use (brushless or linear motor), and what kind of force measurement device (in-line s-type load cell or three pulley in-line load cell). Knowing these options, Brad and I did small tests where we 3d printed quick mounts and secured things to the table using clamps. Then, once I combined the Moteus brushless motor and the three-pulley load cell, I made many iterations, increasing the strength and precision, which could be quantified by our in-line to S-type load cell test. This test slowly increased and then decreased the torque to a maximum value over 20 seconds and produced a plot comparing the programmed torque, the S-type, and the in-line load cell. This allowed us to see the deformation in the plastic and the in-line sensor as the torque increased to its maximum. Slight differences in the components' density, material, friction, or form would significantly affect the accuracy of the in-line load cell at the higher peak torque. It is not normal in a design process to see how the strength increases through different physical iterations, so that was a special learning experience this summer.
Looking forward, the challenges of coordinating multiple tendons with intersecting lines of action and range-of-motion dependencies will require more advanced routing systems and biomechanical modeling. Future work may involve real-time kinematic feedback using motion capture and anatomical modeling to adjust force targets and movement paths dynamically. Overall, this summer’s work establishes the technical framework and practical design philosophy needed to move toward a full-scale, biologically accurate tendon simulation system.
More information about the lab can be found on https://sites.google.com/swarthmore.edu/biomechanics
